Android機器人
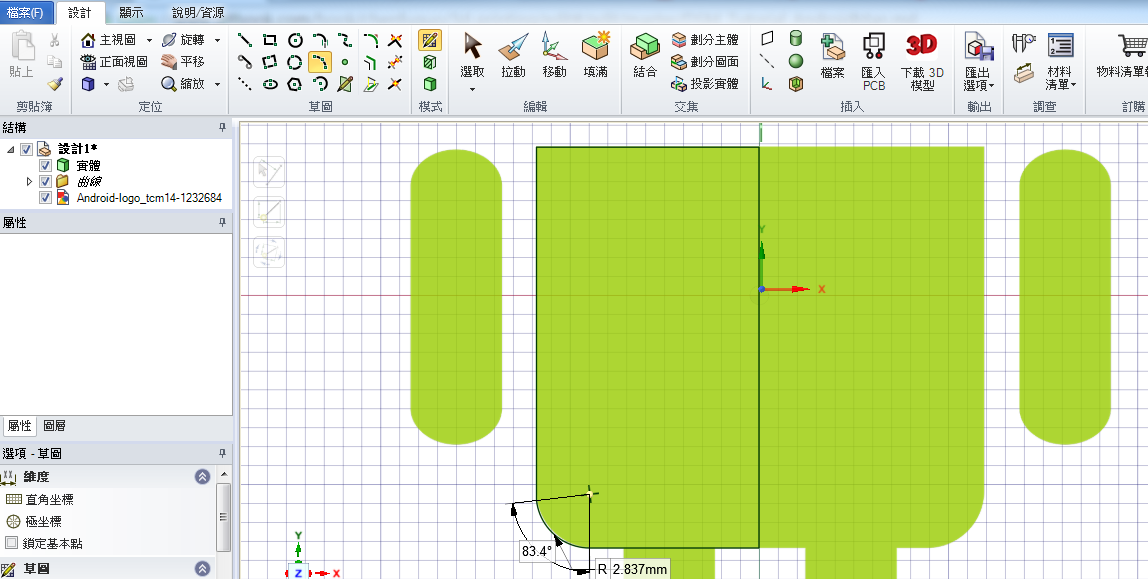
先找並下載一張平面的Android機器圖案,用來進行機器人的輪廓繪製參考。
把圖案拖拉至DSM的設計上
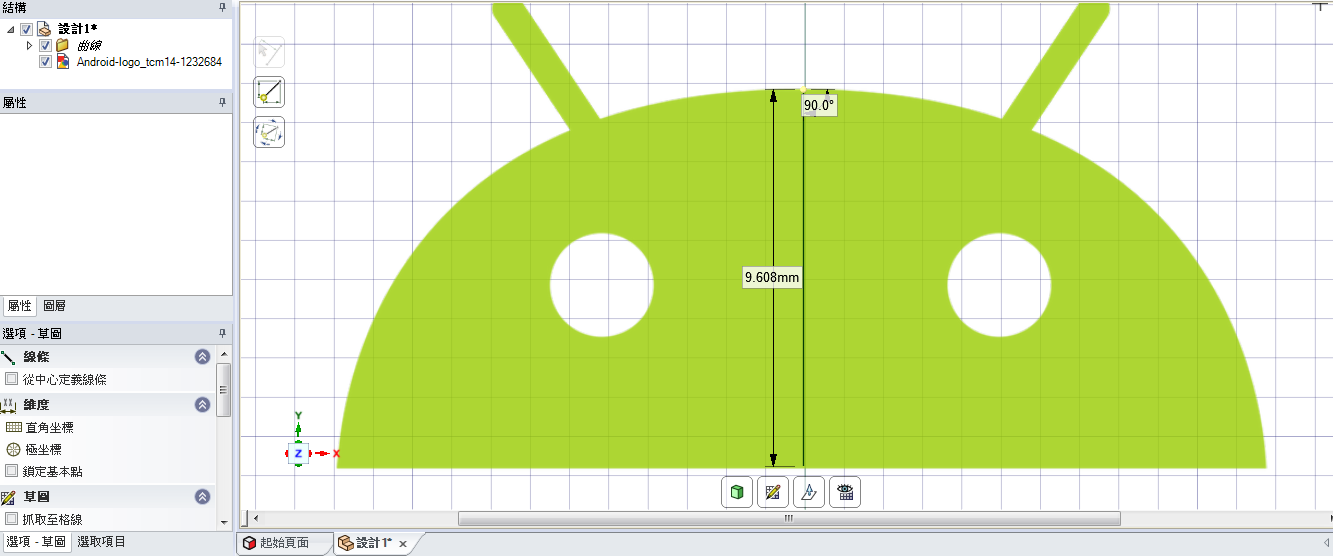
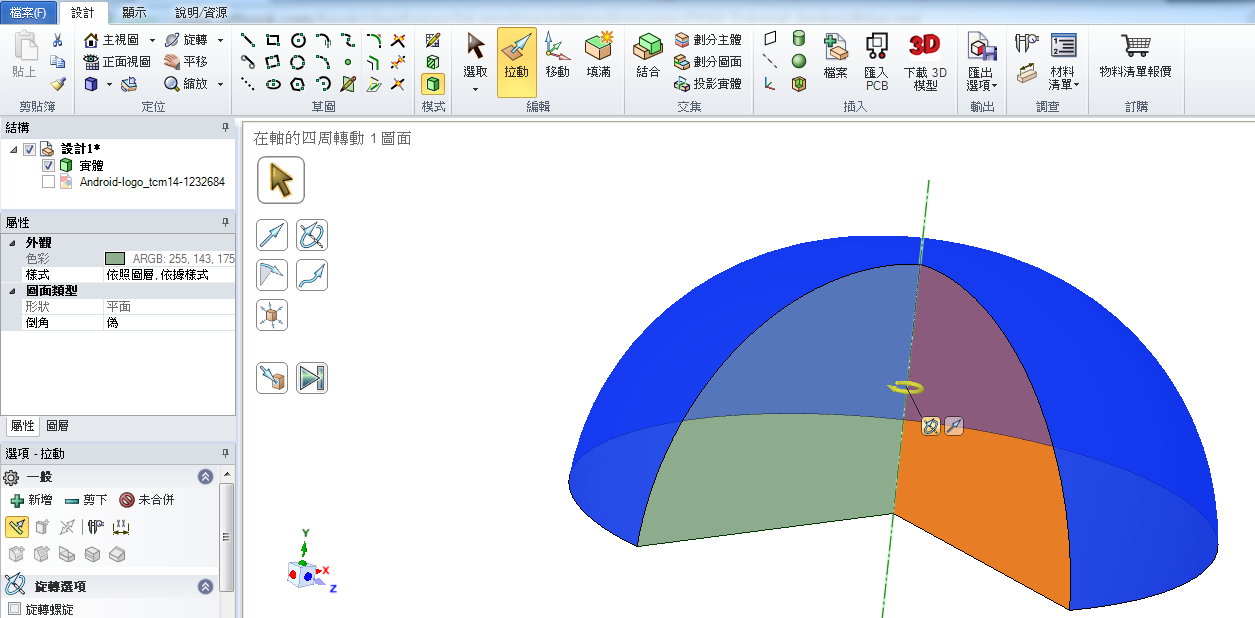
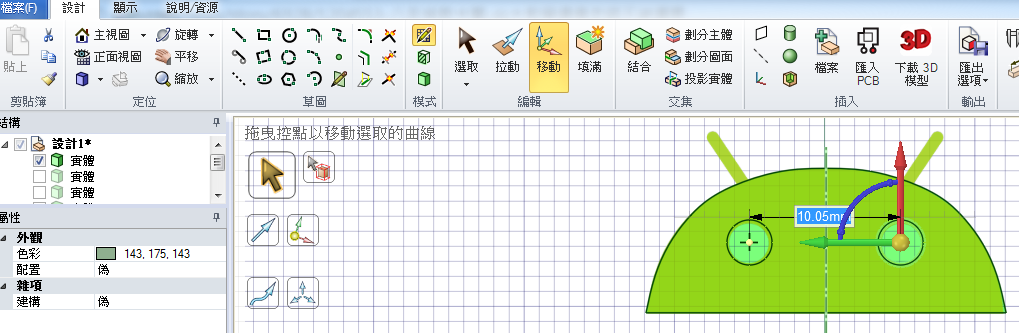
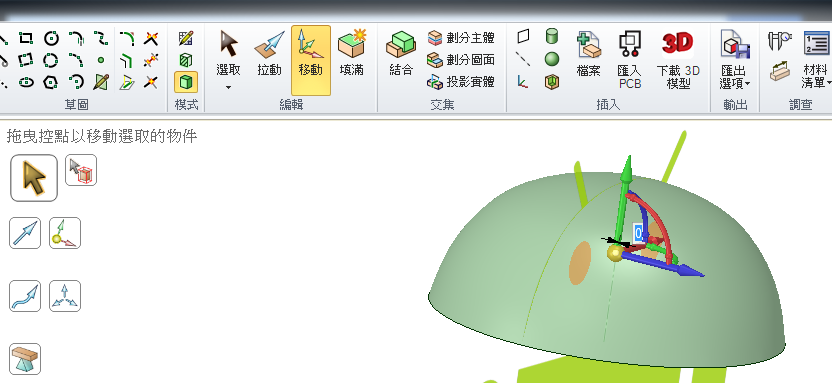
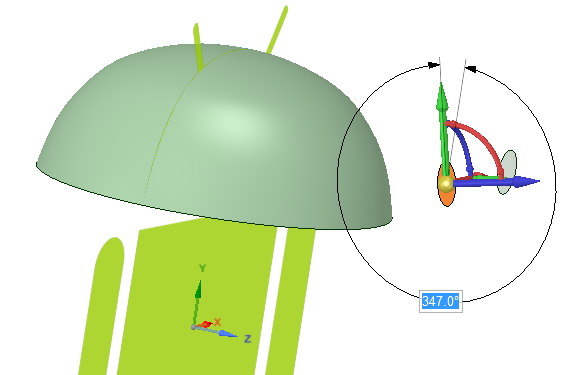
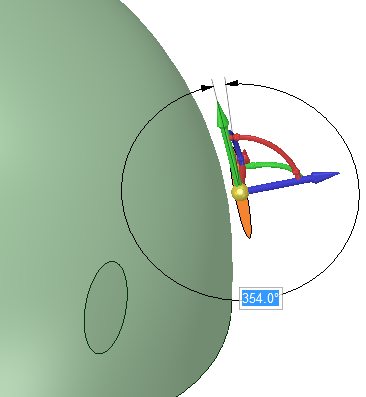
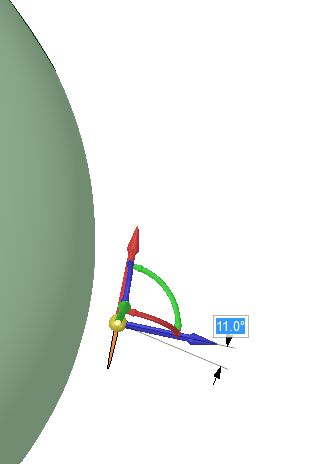
我們要用軸拉動的方式,拉出一個半球形,如下二圖所示,將Android機器人頭部以剖半的方式將臉的輪廓線條繪出來(使用直線工具與曲線工具)。
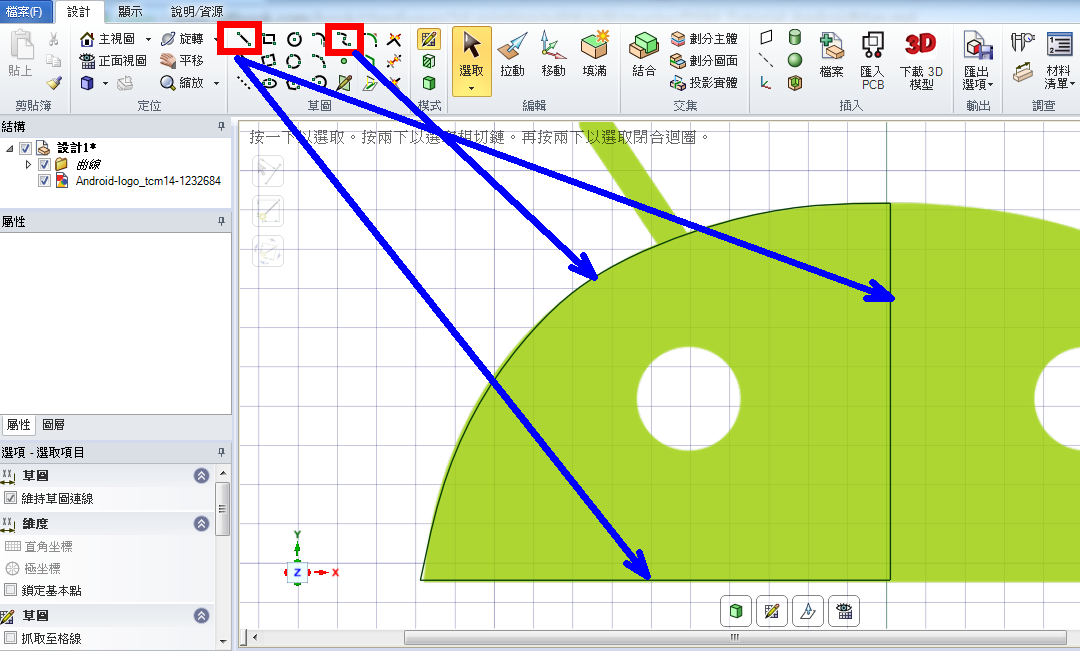
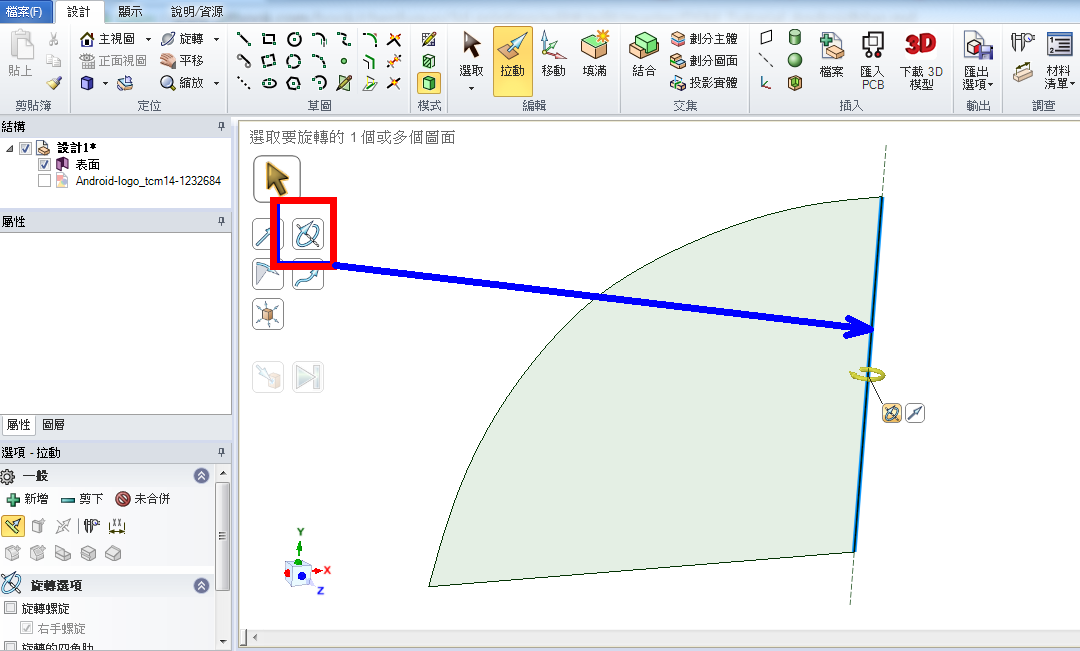
當畫出一個扇形的封閉曲線後,我們可以使用拉動的功能來做出立體的模型,拉動的基本是從面進行拉動,不過此時,我們用拉動的繞軸方式,拉出一個半圓的模型來。
做法:先用拉動功能點選扇形的面(變色),然後再如圖選取繞軸方塊,再選要拉動的扇形邊,此時邊會出現旋轉箭頭,用滑鼠動拉動…。

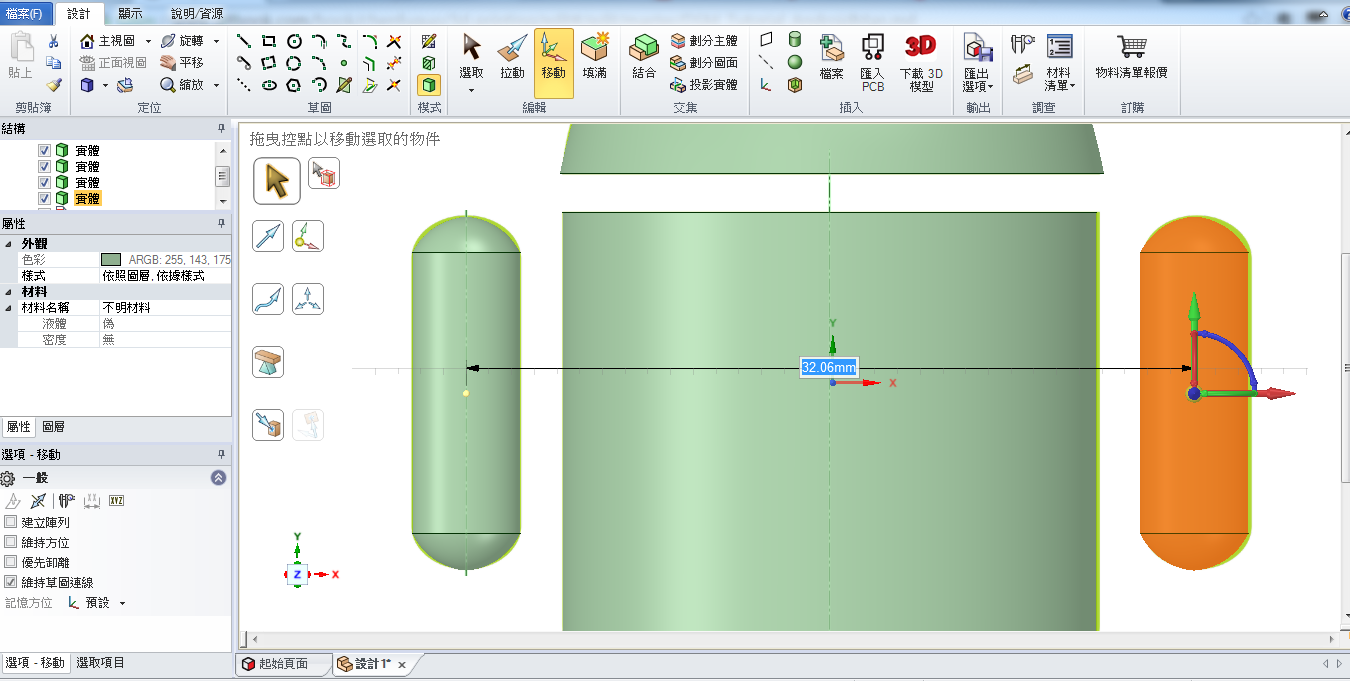
Android身體部份,以及手及腳部份也是如此處理。

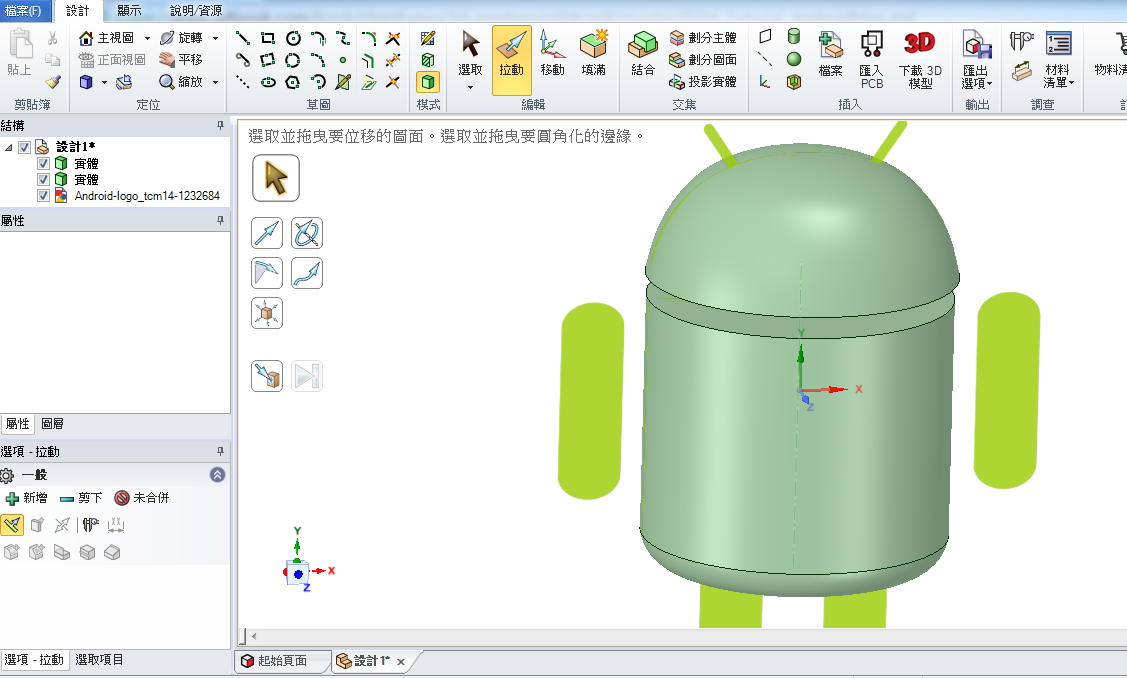

手和腳先做一邊,另一邊可用移動複製的方式進行複製,做法是選取要移動複製的物件,然後按住"ctrl"鍵進行物件的拖拉…。
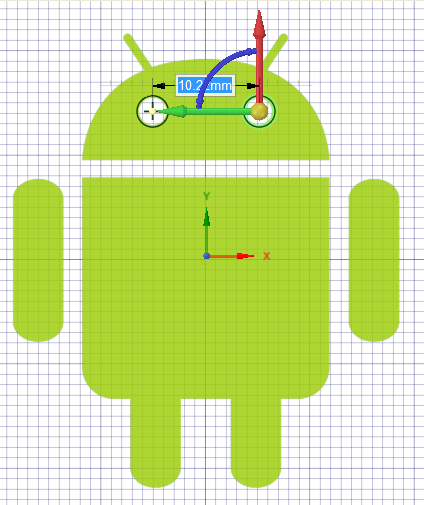
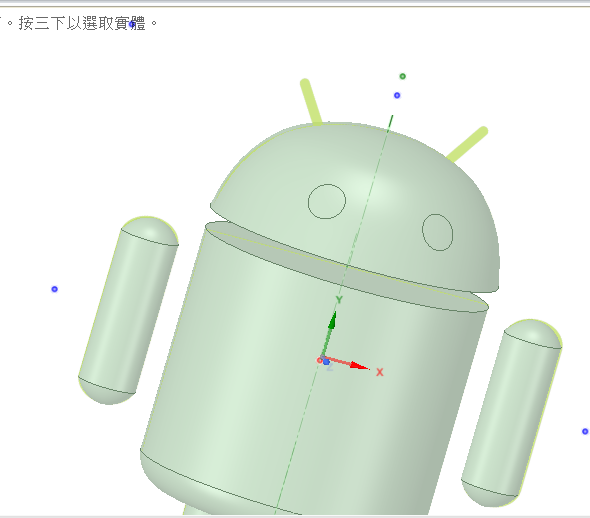
接下來,我們要繪製Android機器人眼睛。
這個有點難度,因為我們無法在一個球面/曲面上繪製基本圖案,我們要用投影實體的方式,在一個平面上繪出二個眼睛表面,再把這二個眼睛表面投影到Android機器人頭部。
我們先把Andorid機器人平面圖叫出來,然後依照圖上的眼睛繪製出二個眼睛表面。
再把二個眼睛表面拉出來,位置在Android機器人頭部的前方。
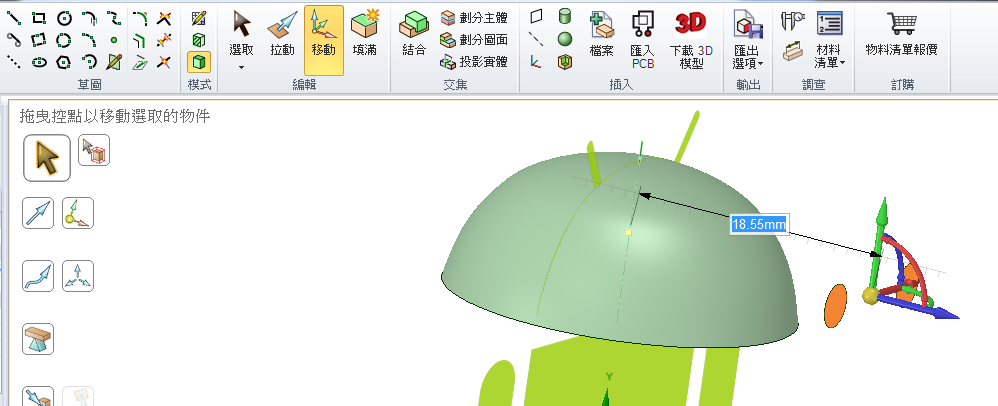

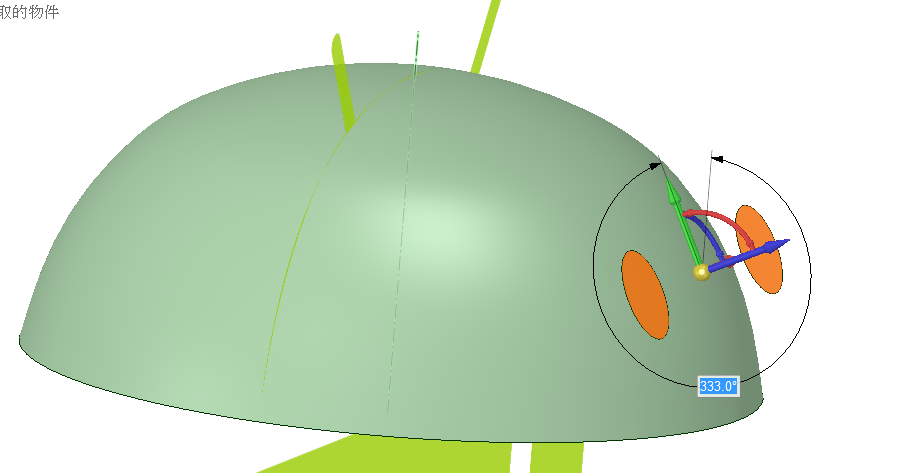
注意,由於眼睛拉出來投射,因為角度投射會造成投射到頭部的眼睛會斜斜的…,投射出來的眼睛會讓Android機器人看起來變邪惡。
我們要修正一下,重點:
1.拉出來的眼睛要離頭部模型越近越好
2.再分別調整左右眼表面的角度,使其貼合頭部曲線

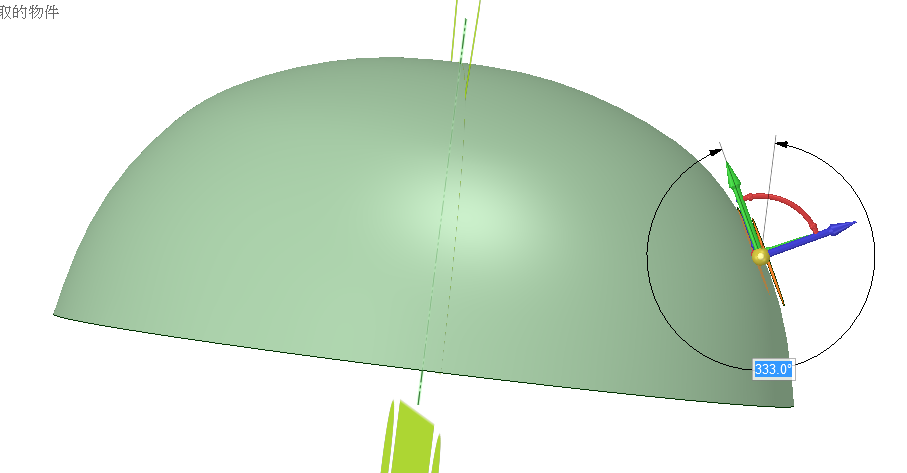
完成眼睛的繪製!
接下來是機器人的天線繪製。(留點功課給大家,賸下的天線自己想怎麼畫了…)
